Flight Modes
Flight Modes 는 언제라도 시스템의 상태를 정의할 수 있습니다. flight mode 사이에 사용자 전환은 리모트 콘트롤의 스위치를 이용하는 방법과 ground control station을 이용하는 방법이 있습니다.
Flight Mode 간략 요약
- MANUAL
- Fixed wing aircraft/ rovers / boats:
- MANUAL: 조정자의 제어 입력이 그대로 출력 mixer로 전달
- STABILIZED: 조정자의 입력 중 roll과 pitch는 angle command로 yaw는 manual 명령.
- Multirotors:
- ACRO: 조정자의 입력은 roll, pitch, yaw rate command로 비행체에 전달. multirotor를 완전히 뒤집기가 가능. throttle은 직접 출력 mixer로 전달.
- RATTITUDE 조정자의 입력은 해당 mode의 임계값보다 큰 경우 roll, pitch, yaw rate command로 비행체에 전달. 만약 임계값보다 크지 않다면 roll과 pitch는 angle command로 yaw는 rate command로 전달. throttle은 직접 출력 mixer로 전달.
- STABILIZED 조정자의 입력은 roll과 pitch angle command로 전달되고 yaw는 rate command로 전달. throttle은 직접 output mixer로 전달.
- Fixed wing aircraft/ rovers / boats:
- ASSISTED
- ALTCTL
- Fixed wing aircraft: roll, pitch 그리고 yaw 입력이 모두 가운데 위치할때(지정한 deadband 범위을 넘지 않는 경우), 비행체는 현재 고도를 유지하며 똑바로 돌아온다. 바람이 부는 경우 drift가 발생할 수 있다.
- Multirotors: roll, picth 그리고 yaw 입력은 MANUAL mode와 동일. throttle 입력은 사전에 지정한 최대 rate에서 위나 아래로 이동 지시. throttle은 큰 deadzone을 가짐.
- POSCTL
- Fixed wing aircraft: 중립 입력일 때 수평으로 비행하며 직선으로 유지해야 하는 경우라면 바람때문에 문제될 수 있음.
- Multirotors: roll은 왼쪽-오른쪽 속도를 제어하고 pitch는 앞-뒤 속도를 제어한다. roll과 pitch가 모두 가운데(deadzone 내부) 있는 경우, 멀티로터는 position을 유지하게 됩니다. yaw는 MANUAL mode와 같이 yaw rate를 제어. throttle은 상승/하강 rate를 ALTCTL mode처럼 제어.
- ALTCTL
- AUTO
- AUTO_LOITER
- Fixed wing aircraft: 비행체가 현재 고도와 현재 위치 주위에 떠있는다.(혹은 현재 고도보다 약간 높을 수도 있음)
- Multirotors: 멀티로터는 현재 위치와 고도에서 그대로 떠있다.
- AUTO_RTL
- Fixed wing aircraft: 비행체는 홈 위치로 돌아와서 홈 주위를 원을 그리면서 떠있다.
- Multirotors: 멀티로터는 현재 고도에서 직선(home position + loiter altitude보다 높은 경우) 혹은 loiter altitude(현대 고도보다 높은 경우)로 돌아온다. 다음으로 자동 착륙.
- AUTO_MISSION
- All system types: 비행체는 GCS가 보낸 프로그램된 mission을 따름. 만약 수신한 mission이 없는 경우에는 비행체는 현재 위치에서 LOITER하게 됨.
- AUTO_LOITER
- OFFBOARD 이 모드에서 position, velocity 그리고 attitude reference / target / setpoint은 시리얼 케이블과 MAVLink로 연결된 컴패니온 컴퓨터에서 제공합니다. offboard setpoint는 MAVROS 나 Dronekit와 같은 API를 제공할 수 있습니다.
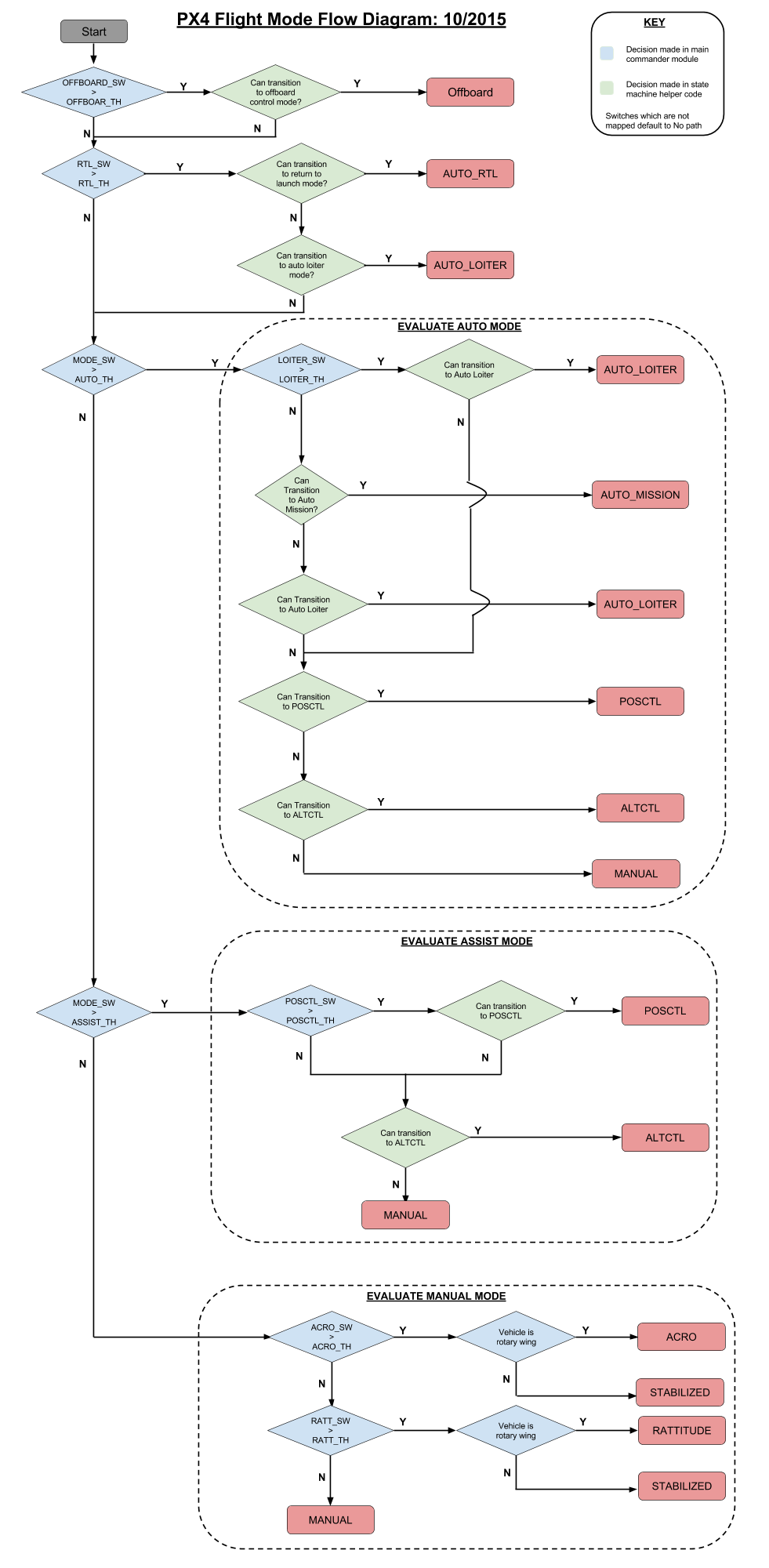
Flight Mode Evaluation 다이어그램